

在智能制造迈向柔性化的今天,3D视觉引导正成为机器人“看懂世界”的核心支撑。从无序抓取到精密装配,从打磨抛光到动态跟踪,这项技术赋予机器人感知三维空间的能力。然而,一个被反复验证的尴尬现实是:即便3D视觉系统提供了精确的目标坐标,机器人却常常“差之毫厘”。问题的症结,往往不在于视觉本身,而深藏于机器人运动学模型误差之中。
理想模型与现实偏差的鸿沟
每一台工业机器人在出厂时,都附带一套理论运动学模型。这套模型基于刚体假设和理想关节结构,通过正运动学计算将关节角度映射为末端位姿。但在实际工况中,机器人从来不是那个“理想模型”。
几何参数误差是首要影响因素。连杆长度、扭角、关节偏移量,这些DH参数在加工装配过程中必然存在偏差。即使是高精度制造的机器人,微米级的连杆误差经过多轴叠加后,末端位置偏差可能被放大到毫米级。而当机器人长期运行后,机械磨损更会让这些参数发生不可逆的漂移。
非几何误差同样不可忽视。减速机的传动误差、关节柔性变形、齿轮回程间隙、温度变化导致的热膨胀——这些因素难以用静态模型描述,却真实地影响着每一寸移动。尤其是在高速运动或变负载工况下,惯性力和重力引起的弹性变形,会让实际轨迹与理论轨迹产生显著偏离。
从视觉坐标到机器人坐标的传递失真
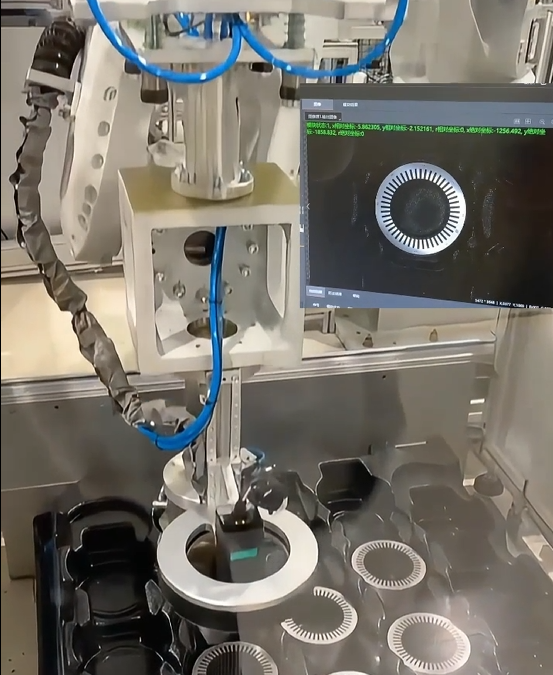
3D视觉引导的本质,是将视觉系统感知到的目标位置,转换到机器人基坐标系下执行。这条传递链上的误差累积,往往比单环节误差更为致命。
手眼标定误差是传递链条中的第一道关卡。无论是“眼在手”还是“眼在手上”,标定过程都涉及从相机坐标系到机器人工具坐标系的变换矩阵求解。标定板的精度、标定点位的分布、非线性畸变的补偿程度,任何环节的瑕疵都会将误差引入整个系统。更棘手的是,标定误差往往呈现非线性,难以通过简单的平移补偿消除。
工件坐标系与机器人基坐标系的对准偏差则是另一重挑战。在实际产线中,工件往往由夹具定位,而夹具本身的安装误差、工件的批次尺寸波动,都会导致工件坐标系相对于机器人基坐标系的偏移。如果3D视觉系统直接输出绝对坐标而未能实时补偿这些偏移,机器人的抓取或装配动作便会出现系统性偏差。
动态误差在高速引导场景中尤为突出。当机器人进行连续轨迹运动或跟踪移动目标时,伺服系统的跟踪延迟、路径规划算法的插补误差,都会让实际到达点与视觉指令点之间存在时间差。这个“动态滞后”如果未被建模和补偿,将直接导致重复定位精度失控。
误差辨识与补偿的系统性思路
破解运动学模型误差,不能指望一次标定一劳永逸。真正有效的策略,是建立“误差辨识-模型修正-实时补偿”的闭环机制。
高精度外部测量是误差辨识的基础。借助激光跟踪仪、拉线编码器或高精度视觉跟踪系统,获取机器人在工作空间内多组位姿的真实值,与理论模型输出的名义值进行对比,反解出关键几何误差参数。这一过程需要充分考虑测量点位的空间分布,确保误差模型在整个工作空间内具有泛化能力。
弹性变形建模针对非几何误差尤为关键。通过建立机器人的刚度模型,结合各关节实时受力情况,在线预测末端变形量并前馈补偿。对于温度敏感的应用场景,还需引入温度传感器进行热误差补偿,将热致漂移控制在可接受范围内。
视觉引导的自适应校准则是从系统层面化解误差的实用路径。区别于绝对定位方式,可以采用相对定位策略——让视觉系统不仅提供目标位置,同时实时监测机器人末端与目标的相对位姿偏差,形成闭环修正。这种方式能够有效规避手眼标定误差和运动学模型误差的累积效应,在抓取、放置等典型场景中显著提升成功率。
结语
3D视觉引导的价值,最终落脚在机器人能否“精准到达”。运动学模型误差的存在,打破了“视觉看见即机器人做到”的理想假设。正视误差来源、建立系统的辨识与补偿机制,是释放3D视觉真正潜力的必经之路。在柔性制造对精度与适应性要求日益苛刻的今天,唯有打通视觉感知与运动控制之间的“最后一毫米”,才能让机器人真正成为值得信赖的智能执行单元。



