

引言
在自动化与智能化浪潮中,3D视觉引导技术已成为实现精确感知与操作的核心。它通过采集并解析目标物体的三维空间信息,直接引导机械臂、移动平台等执行机构完成定位、抓取、装配等高精度任务。然而,在实际应用中,获取的点云数据常面临稀疏或缺失的挑战,这直接影响着引导的精度、鲁棒性和可靠性。本文旨在对3D视觉引导流程中点云稀疏与缺失的成因、影响及应对策略进行系统性解析。

一、3D视觉引导的流程与对点云质量的依赖
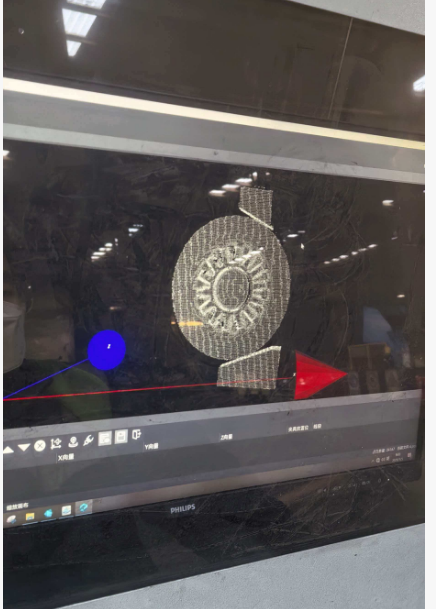
典型的3D视觉引导系统包含三维数据采集、点云预处理、特征提取/匹配、位姿解算与引导输出等关键环节。其核心是依据高质量、完整的点云数据,重建目标物体的几何表面,并据此计算其相对于引导坐标系的空间位置与姿态(即6-DoF位姿)。
点云的质量,尤其是其密度与完整性,是决定后续所有环节成败的基础。稠密且完整的点云能够更精确地描述物体表面细节和轮廓,为特征计算、模型匹配提供丰富的信息支撑。反之,稀疏或存在缺失的点云,如同模糊或残缺的“地图”,将导致后续分析产生巨大偏差甚至失败。
二、点云稀疏与缺失的主要成因
点云数据的质量问题并非孤立现象,其根源贯穿于数据获取与处理的整个链路,与3D视觉引导的每个前序环节紧密相关。
场景与物体自身特性:这是最根本的成因之一。表面特性:对于吸光(如黑色橡胶)、透光(如玻璃)、反光(如镜面、金属)或结构复杂的物体,主动或被动视觉传感器难以获取有效的深度或图像信息,导致点云在该区域严重缺失或噪声极大。环境干扰:环境光变化、烟雾、粉尘、蒸汽等会干扰光信号的传播与接收,造成点云数据不稳定或局部丢失。遮挡问题:在复杂堆叠、装配间隙或自遮挡的情况下,传感器视野无法覆盖物体的全部表面,必然产生数据缺失。
传感器技术的固有限制:不同的3D传感原理(如结构光、双目立体视觉、激光雷达、飞行时间法ToF)均有其适用场景与局限性。例如,测量距离越远,点云通常越稀疏;分辨率限制导致细小特征无法被充分采样;扫描频率与运动速度不匹配可能造成运动模糊和数据稀疏。这些硬件层面的限制是点云数据理想化的首要障碍。
数据处理算法的局限性:在点云预处理阶段,为了去除噪声和无关背景,通常会进行滤波、降采样和分割操作。不恰当的滤波可能过度平滑细节或误删有效点;激进的降采样会人为导致点云稀疏化,损失关键几何信息;不准确的分割则可能将部分目标点云误判为背景而剔除。
三、稀疏与缺失点云对引导任务的具体影响
点云质量缺陷会逐级传导并放大其负面影响:
特征描述与提取困难:大多数基于特征的匹配算法(如FPFH、SHOT等)依赖局部邻域点集来估算法线、曲率等几何特征。点云稀疏会使得局部邻域信息不足,计算出的特征描述子不稳定、区分度低;点云缺失则直接导致该区域无法提取有效特征。
匹配与配准精度下降:无论是基于特征的匹配还是全局迭代最近点(ICP)类算法,其目标都是寻找最优的空间变换。稀疏点云提供的约束条件不足,容易导致匹配陷入局部最优解或产生错误对齐;而存在大片缺失区域的点云与完整模型进行配准时,算法可能强行将缺失部分与模型的不相关区域对齐,产生严重的位姿偏差。
位姿估计不确定性增加:最终计算出的物体位姿置信度与所用点云数据的质量和覆盖度直接相关。稀疏/缺失的点云会增大位姿解算的协方差,即估计结果的不确定性显著增加。在要求高精度引导的场合,如精密装配、插孔,这种不确定性可直接导致任务失败或设备碰撞。
四、面向3D视觉引导的增强与补偿策略
解决点云稀疏与缺失问题是一个系统工程,需从感知、算法到系统设计进行全方位优化。
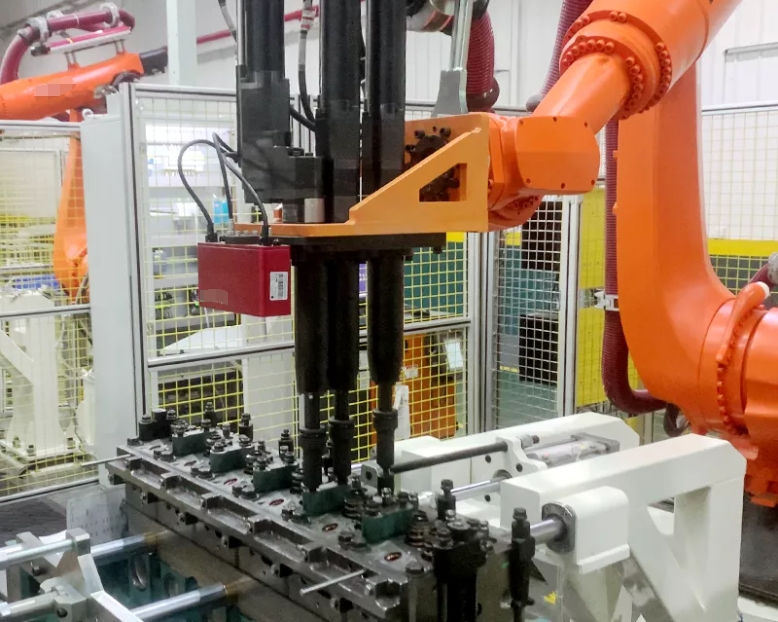
多传感器融合与优化布置:这是从源头增强数据完备性的有效策略。通过融合不同原理、不同视角的传感器数据(如将对纹理敏感的双目视觉与对特定表面有效的线激光扫描结合),可以互补各自的盲区。优化传感器的空间布局(如增加侧视、俯视视角),能有效减少遮挡导致的缺失。
先进的点云预处理与重建算法:发展针对性的算法处理质量不佳的点云。例如,利用基于深度学习或传统插值的方法,在保持几何结构的前提下对稀疏区域进行合理的密度增强;针对特定已知物体的缺失,结合先验CAD模型进行局部点云修复或补全;采用更鲁棒的滤波和分割算法,在去噪的同时最大限度保留有效数据。
鲁棒的特征与匹配方法:设计对点云密度变化和局部缺失不敏感的特征描述子与匹配策略。例如,采用全局描述符与局部描述符相结合的方式;使用不需要依赖法线等局部几何量的特征;或采用基于深度学习的端到端点云配准网络,这些网络能够从有缺陷的数据中学习更鲁棒的特征表示。
引导策略的系统级容错设计:在系统层面,可以引入置信度评估机制。当检测到点云质量过低或位姿估计不确定性超过阈值时,系统可触发重扫描、请求人工干预或切换至更保守的引导策略(如降低速度、增加安全检测)。同时,结合任务上下文信息,例如在已知物体大致型号和姿态范围的情况下,可以显著缩小匹配搜索空间,提升在数据不佳情况下的引导成功率。
结论
点云数据的稀疏与缺失是3D视觉引导技术在实际工业场景中落地所必须正视和攻克的核心挑战。它根植于物理世界的复杂性、传感器技术的局限性以及信息处理过程的损耗。对这一问题的深刻解析表明,不存在单一的“银弹”解决方案。未来的发展方向在于构建一个感知更全面、算法更智能、系统更容错的综合性3D视觉引导体系。通过多源感知融合、先进人工智能算法与闭环反馈控制的深度结合,不断提升在非理想、高动态现实环境下基于不完美点云数据进行可靠、高精度引导的能力,从而推动3D视觉引导技术在更广阔领域的深化应用。



