在智能制造升级的浪潮中,3D视觉无序抓取技术正成为自动化产线的“刚需”——从汽车零部件的杂乱分拣到物流包裹的高效搬运,它让机器人摆脱了“按图索骥”的固定模式,实现了对“混乱”环境的精准适应。然而,当物料密集堆叠、空间高度受限时,如何规划一条“看得清、避得开、抓得准”的路径,仍是制约技术落地的核心瓶颈。本文聚焦密集环境下的路径规划难题,解析其技术逻辑与突破方向,为行业应用提供关键思路。
密集环境:3D视觉无序抓取的“压力测试场”
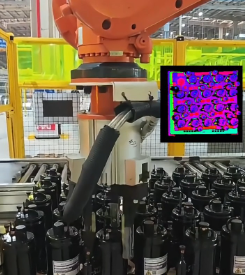
密集环境的核心特征是“高干扰”与“低容错”:物料堆叠导致部分物体被遮挡,3D视觉需穿透表层点云,识别底层物体的轮廓与姿态;狭窄空间内,机械臂的运动轨迹易与相邻物体或环境发生碰撞,尤其在连续抓取时,需实时规避动态变化的障碍物;生产节拍要求路径规划在毫秒级完成,而密集点云数据的计算量巨大,传统算法易因响应延迟导致效率下降。
这些挑战的本质,是“视觉感知精度”与“运动控制效率”的双重博弈:若视觉无法完整重建物体三维模型,抓取点识别将出现偏差;若路径规划无法兼顾实时性与安全性,机械臂便会在“犹豫”或“碰撞”中停滞。
技术破局:从“感知增强”到“智能规划”的全链路优化
破解密集环境难题,需构建“3D视觉感知-路径智能规划-实时动态执行”的闭环技术链。
3D视觉的核心任务是“去噪”与“补全”。通过多视角点云融合技术,利用多个相机或机械臂移动扫描,拼接不同角度的点云数据,补全被遮挡物体的隐藏面,构建完整的场景三维模型。同时,引入深度学习点云分割算法,训练模型精准区分堆叠物体的边界,识别可抓取的“安全区域”(如物体凸起、边缘等),避免因误判导致抓取失败。
路径规划需在“全局最优”与“局部实时”之间找到平衡。全局层采用改进的快速搜索随机树(RRT*)算法,基于完整点云模型生成初始无碰路径,确保机械臂能从起点安全接近目标物体;局部层引入动态窗口法(DWA),结合实时传感器反馈,在运动过程中微调轨迹,规避突发障碍物(如物料滑动、人员误入)。这种“全局粗规划+局部精调整”的双层架构,既保证了路径的安全性,又满足了毫秒级响应的生产节拍。
应用价值:让“混乱”成为自动化的新常态
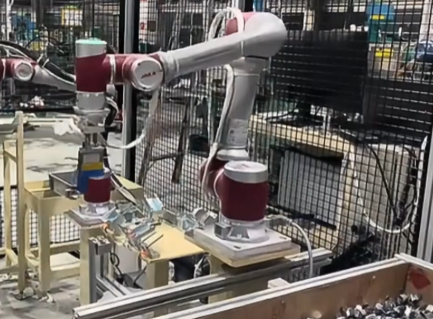
在汽车零部件制造中,无序抓取系统可从料筐中精准抓取堆叠的铸件,通过路径规划避开相邻零件,实现“抓取-搬运-码放”的全自动化,将人工成本降低60%,节拍提升至传统产线的2倍;物流分拣场景下,面对密集堆叠的包裹,3D视觉快速识别可抓取面,路径规划算法自动计算最优抓取角度,避免包裹倾倒或碰撞,分拣效率稳定在每小时数千件。
更重要的是,该技术让产线具备了“柔性适应能力”:当物料种类、堆叠方式变化时,无需重新编程或调整硬件,系统通过视觉感知与路径自规划,即可快速适应新场景,大幅缩短换型调试时间。
未来展望:从“单机智能”到“群体协同”
随着AI与边缘计算技术的发展,3D视觉无序抓取的路径规划将向更深层进化。一是“预测性规划”:通过时序点云分析,预测物料堆叠状态的变化趋势,提前规划抓取路径,实现“预判式抓取”;二是“多机协同规划”:在密集产线中,多台机械臂共享视觉数据,通过分布式算法协调路径,避免互相碰撞,形成“群体智能抓取网络”。
密集环境下的路径规划,本质是让机器人学会在“混乱”中寻找秩序。这不仅是3D视觉无序抓取技术落地的关键,更是智能制造从“标准化”走向“柔性化”的重要标志。当机器能从容应对“混乱”,自动化的边界将被彻底打开——这正是技术赋予产业的终极价值。