在物流仓储与智能制造领域,拆码垛一直是自动化升级的关键环节。传统的示教或2D视觉方案在面对复杂、多变、堆叠的场景时往往力不从心,而3D视觉引导的崛起,正为这一难题带来根本性突破。本文将以专业视角,解析其核心技术逻辑与应用价值。
一、为什么拆码垛离不开3D视觉?
传统拆码垛依赖固定轨迹或简单的平面检测,一旦来料姿态随机、纸箱表面图案杂乱、或出现倾斜、层叠交错,极易抓取失败甚至损坏货物。而3D视觉引导通过获取三维点云数据,能精确感知每个垛型、每层箱体的空间位置与姿态,从而指导机器人实现动态、柔性的抓取。
核心差异在于:2D只能看到“平面投影”,3D则还原了“立体真实”。对于异形件、紧密堆叠、反光或深色物体,3D视觉的点云分割与匹配算法具有不可替代的优势。
二、技术流程拆解:从点云到精准抓取
一套完整的3D视觉引导拆码垛系统,通常包含四个关键步骤:
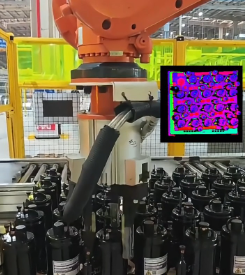
三维成像:采用结构光、激光条纹或双目立体视觉方案,快速生成高密度点云。关键在于克服环境光干扰、消除金属/塑料反光,并保证对薄壁或细长物体的精确重建。
点云预处理:滤波去噪、下采样、分割地面与背景。实际工况中,叉齿、托盘、捆扎带等干扰物需要高效剔除,只保留目标垛堆。
物体检测与位姿估计:这是核心算法环节。利用点云聚类、模型匹配或深度学习(如PointNet变体)识别出每个箱体的6-DOF位姿。对于紧贴或交错堆叠,需实现“单点分离”——哪怕仅1cm的边缘间隙,也能定位独立抓取点。
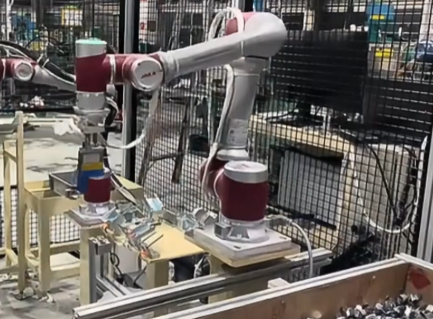
抓取规划与避障:基于位姿结果,结合吸盘/夹具的力学模型,生成无碰撞抓取路径。优秀系统还能自适应更新“拆垛顺序”:优先抓取最上层、无压叠的箱子,并实时处理局部塌陷或滑移。
三、落地应用的三大显著优势
高通用性:无需定制托盘或整垛规整码放。无论是混码、乱码还是半坍塌垛型,3D视觉引导可快速适应不同尺寸、颜色、纹理的箱体、袋装或桶状物料。
低部署成本:相比机械限位或精密传送带,3D视觉+机器人仅需一次标定。换产时无需硬件改造,切换程序即可,尤其适合SKU繁多的电商、医药、冷链行业。
高稳定性与回报率:视觉系统实时反馈偏差,补偿机器人绝对定位误差。实际案例中,抓取成功率可达99.5%以上,且每小时处理量轻松超过人工2~3倍,投资回报周期普遍控制在6~18个月。
四、挑战与未来方向
尽管3D视觉引导已日趋成熟,仍面临极端反光(如镀膜纸箱)、透明塑料包装、密集细长杆状物等棘手场景。未来趋势是融合AI——利用大规模合成数据训练语义分割网络,使系统具备“推理”能力:比如识别箱子叠压关系,预判拆垛风险。
此外,边缘计算与轻量化模型的发展,让实时3D处理不再依赖昂贵工控机,进一步降低系统门槛。
结语
3D视觉引导拆码垛,已从“锦上添花”变为“刚需技术”。它赋予机器人真正的眼睛与大脑——不仅“看见”三维世界,更能“理解”堆积逻辑。对于寻求柔性自动化升级的企业,这无疑是一条清晰、高效且经过验证的技术路径。下一步要做的,就是结合自身物料特性,选择适配的成像方案与算法策略,让3D视觉真正落地生根。