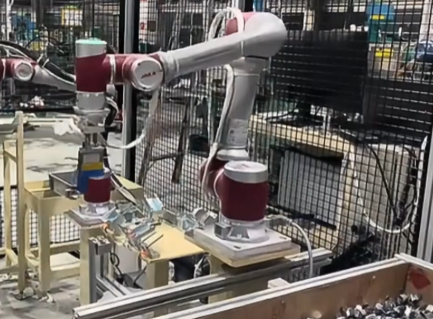
在自动化产线上,“抓取”从来不是最难的环节——难的是抓取一个不知道在哪儿、不知道什么姿势、还被其他零件压住的工件。这就是典型的无序来料场景:工件凌乱堆放在料框、托盘或传送带上,姿态随机、位置任意。
面对这种场景,很多人第一反应是“用相机看看不就行了”?但实际尝试后会发现:2D视觉,远远不够。本文从技术底层拆解:为什么无序抓取必须靠3D视觉引导,以及它究竟解决了哪些2D解决不了的问题。
一、2D视觉的先天局限:只有平面,没有深度
2D相机拍出的是一张图——它有X和Y坐标,但没有Z坐标。这意味着:它能告诉你“工件在画面的哪个位置”,但无法告诉你“工件离相机有多远”。
在无序堆叠场景中,工件可能位于料框的不同高度,甚至上下叠压。2D视觉无法区分哪个工件在上层、哪个在下层,也无法判断机械臂应该伸到什么深度去抓。如果强行用2D定位抓取,结果往往是:机械臂空抓、撞到上层工件、或把整个料堆推倒。
深度信息的缺失,是2D无法逾越的物理天花板。
二、3D视觉引导的核心能力:把“平面猜测”变成“空间定位”
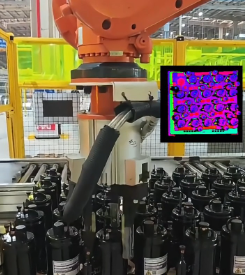
3D视觉引导通过结构光、激光条纹或双目立体视觉等技术,获取每个工件在三维空间中的精确坐标和姿态——X、Y、Z、以及绕三个轴的旋转角度。这相当于给了机器人一双“有深度感知的眼睛”。
有了这些数据,机器人不再“盲猜”:它知道抓取点在哪里,也知道从哪个方向接近最稳定、最安全。更重要的是,3D视觉可以识别堆叠关系,优先抓取处于最上层、无遮挡的工件,逐层剥离,直到清空料框。
这是从“看见”到“看懂空间”的本质跃升。
三、三大实战场景:2D无奈,3D从容
场景一:深框杂乱堆叠
工件层层叠压,2D视觉只能看到最上面的一层,甚至因阴影和重叠而无法识别单个工件。3D视觉引导通过点云分割,将每个工件的三维轮廓从背景和相邻工件中分离出来,输出可抓取候选位姿。
场景二:反光或暗色工件
黑色橡胶件、抛光金属件在2D图像中特征极弱,易导致识别失败。而3D视觉中的主动结构光技术不依赖表面纹理,直接测量几何形状,反光暗色不再是障碍。
场景三:多品种混料
不同形状的工件混放在一起,2D需要针对每种工件单独训练模板。3D视觉引导可基于三维模型匹配,一次建模,适配所有相似品类,换产只需切换模型文件。
四、投入产出:为什么说3D视觉引导更“划算”
有人担心3D方案比2D贵。但算清楚两笔账就明白了:
一是成功率账——2D抓取往往只有70-80%的成功率,剩余需要人工干预,产线效率大打折扣;3D视觉引导可将抓取成功率提升到99%以上,无人化真正落地。
二是工装账——2D通常需要配合精确定位的托盘或振动盘,这本身就是不菲的成本;3D视觉引导允许工件任意摆放,省去大量工装投入。
综合来看,大多数企业切换到3D视觉引导后,6-12个月即可收回差额成本,之后持续享受高可靠性带来的降本效益。
无序来料不是自动化的终点,而是分水岭。2D视觉解决了“有没有、在哪儿”的问题,而3D视觉引导才真正解决了“怎么抓、抓得准”的问题。当你的产线面对一堆凌乱的零件不再束手无策时,你就已经迈进了下一代智能抓取的门槛。